

A contest on Pinshape (https://pinshape.com/contests/design-for-electronics-contest) got me to simplify the design of Felix and optimise it for 3D printing. The focus was on minimal support material, fast print time and optimal orientation on the print bed for best first layer adhesion. Other concerns where easy of assembly and sturdinnes of the final robot.
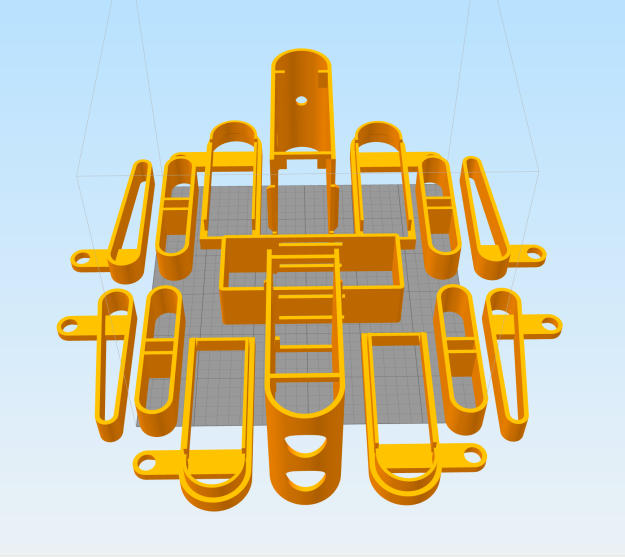
You can download and print the design from Pinshape (https://pinshape.com/items/27304-3d-printed-quadruped-robot)
If you want to edit/customise the 3D model, you are free to copy my OnShape project using this link: https://cad.onshape.com/docume…
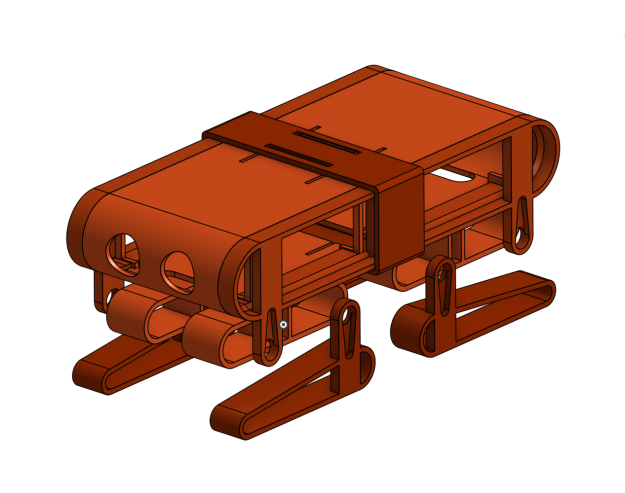
There ain’t much room for my current electronics setup. The servo connectors require a lot of space – even using angled pins. So I have ordered a feather board and a servo feather wing from Adafruit. The feather board has the added bonus that it can be controlled via Iphone/Android using Bluetooth.





This is a great project, thanks for sharing! Could you please share the code – I’m curious to see how you got such a cool walk cycle.
Hi Tavares, the gait you see on the video is coded in JavaScript using JohnnyFive. The repo is here: https://github.com/Traverso/JSFelix
For this new puppy I’m using an Adafruit Feather board, and writing a new version (similar IK and gait mngr.) using Arduino sketch or C. I’ll post the url of the new repo when I have cleaned things up a bit.